Authors
Łukasiewicz Research Network—Industrial Research Institute for Automation and Measurements PIAP, 02-486 Warsaw, Poland, rafal.wieckowski@piap.lukasiewicz.gov.pl
Bartosz Meglicki,
Łukasiewicz Research Network—Industrial Research Institute for Automation and Measurements PIAP, 02-486 Warsaw, Poland, bartosz.meglicki@piap.lukasiewicz.gov.pl
Jakub Kowaliński,
Łukasiewicz Research Network—Industrial Research Institute for Automation and Measurements PIAP, 02-486 Warsaw, Poland, jakub.kowalinski@piap.lukasiewicz.gov.pl
Aim of the project
Development of an autonomous off-road driving system.
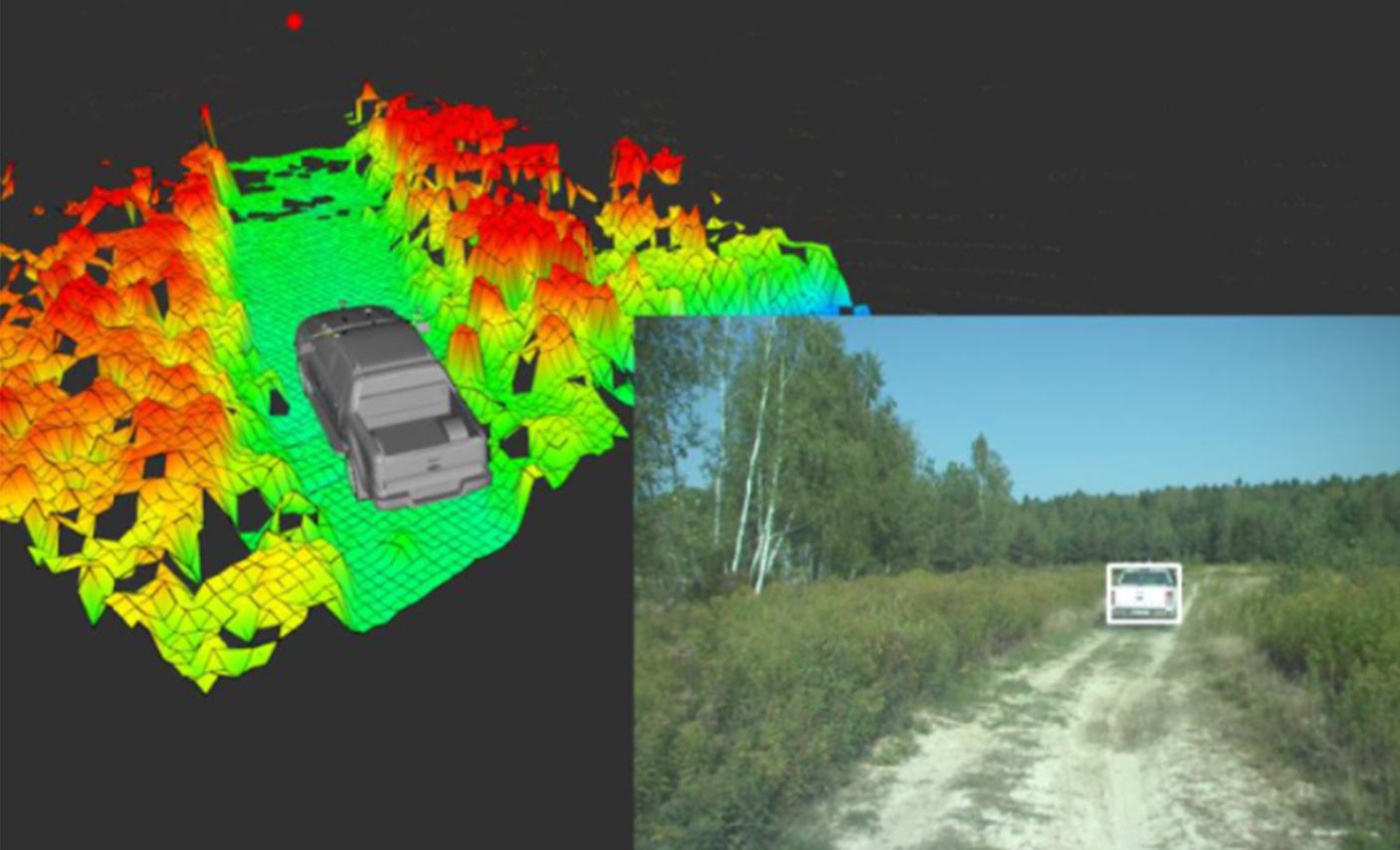
The ATENA project is pioneering the development of an open autonomous system for compatible mobile ground platforms. This innovative system is designed for autonomous tracking of a selected target, such as a vehicle or a person. The ATENA system’s unique features include the ability to control a transport platform supporting infantry units, form convoys, and significantly reduce the personnel required for equipment and vehicle transport. Its open system design allows for the seamless addition of new functions. The ATENA system will be adaptable to various mobile platforms, including vehicles, robots, and quads. Thanks to their advanced learning algorithms and machine vision capabilities, these platforms will operate in any terrain without needing maps and navigation systems.
Short description of the problem addressed by this project
ATENA project addresses the problem of effective navigation of off-road vehicles in various terrain conditions, including challenging and unpredictable off-road environments. This advanced system integrates sensors, control algorithms, and artificial intelligence to enable vehicles to track and follow a selected target automatically. Additionally, it addresses the critical issue of operating in environments without GNSS signals and RF connections with the lead vehicle. Ultimately, the ATENA project can contribute to developing intelligent unmanned convoy systems, reducing the number of personnel required in cars, particularly in hazardous areas.
Main results and achievements
Significant progress has been made during the ATENA project. A demonstrator of autonomous driving technology in adventurous terrain has been successfully created. The ATENA system is equipped with the functionality of following a selected target, a feature based on an AI object detection algorithm that can recognize humans, vehicles, UGVs, and more. The system’s autonomous functions rely solely on vision systems, including cameras and LIDAR sensors. The following target function is based on the fusion of camera and LIDAR sensor data, and object classification is performed using machine learning. To realize a complete autonomous convoy functionality, the ATENA system is based on real-time traversability estimation (no preloaded maps are needed) and leader detection based on an AI algorithm (the leader does not need a special sign or QR codes).
Conclusion
During the project, we achieved two main functionality on the demonstrator of the technology level:
- Autonomous leader following system without GNSS
- Autonomous off-road driving – route mapping based on an analysis of the traversability estimation
Acknowledgments
The project was financed by The National Centre for Research and Development NCBR, “Future technologies for defense – competition for the young scientists” competition No. 2/P/2017.
{kind=link}
{kind=link}
{kind=link}
{kind=link}