Authors
Łukasiewicz Research Network — Industrial Research Institute for Automation and Measurements PIAP, wieckowski@piap.lukasiewicz.gov.pl
Jakub Kowaliński,
Łukasiewicz Research Network — Industrial Research Institute for Automation and Measurements, jakub.kowalinski@piap.lukasiewicz.gov.pl
Aim of the project
The DEZROB project focuses on the development of tools for autonomous disinfection using patrol and reconnaissance robots used by the Polish Armed Forces. The tools will enable spraying and fogging with chemical disinfectants and irradiation of the environment with a UV-C lamp. The scope of DEZROB tools will include an autonomy module in the form of an external device connected to a mobile robot via an access connector. The module will enable autonomous disinfection of rooms, corridors, halls, and pedestrian routes. As part of the project, a set of DEZROB tools will be created, mounted on a mobile base, similar to the equipment of the Polish Armed Forces, and a transport system for the entire solution.
Short description of the problem addressed by this project
The DEZROB project addresses the problem of unmanned disinfection. During regular disinfection, the operator is exposed to both disinfectants and the contaminants in the undisinfected area, which can cause health issues. The idea is to use a robot instead and keep the operator a safe distance from the disinfection area.
To achieve this goal, tools like a UV-C lamp, fogger, and sprayer have been installed on a robot for which proper electrical and mechanical interfaces were designed.
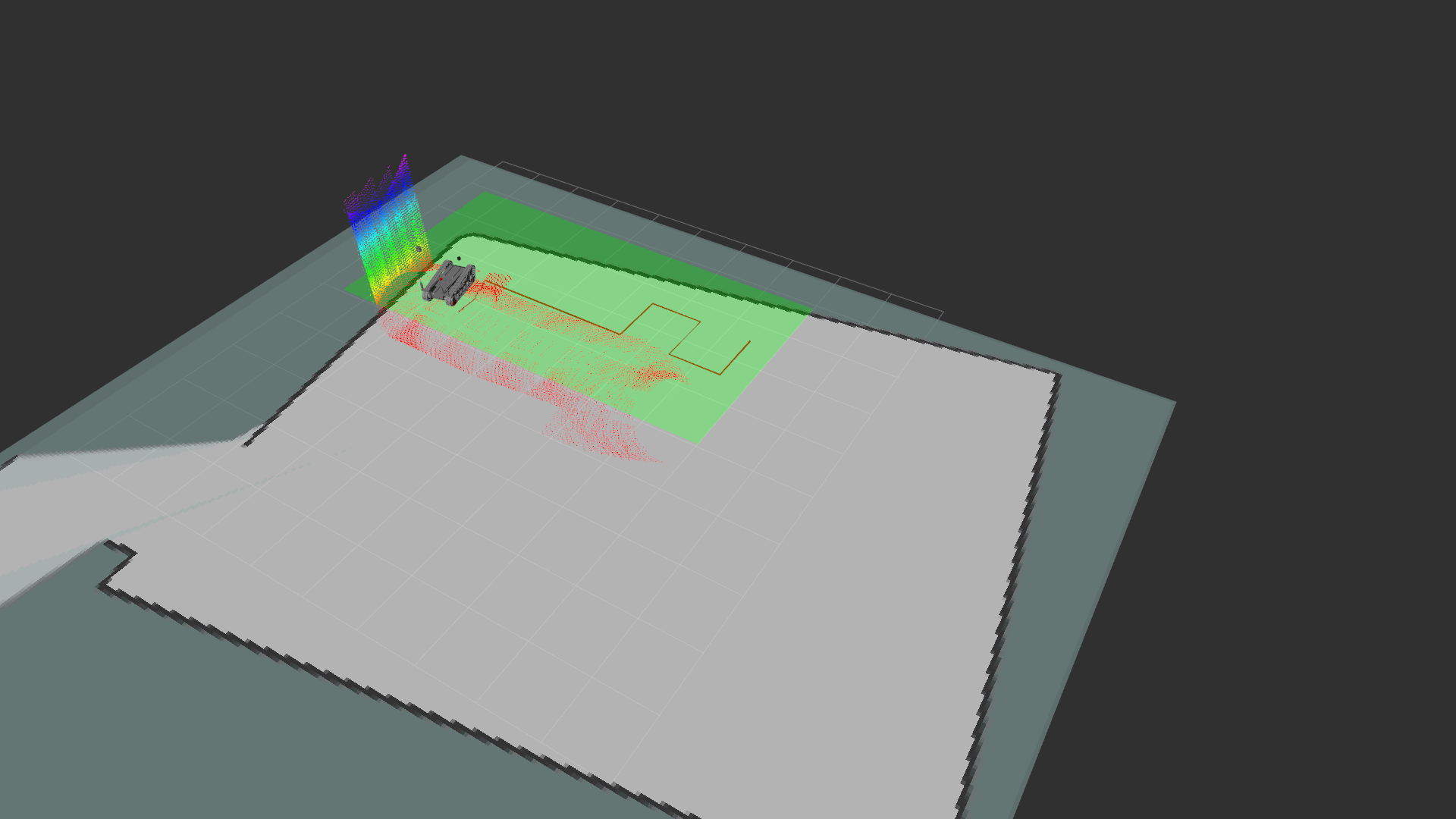
The autonomous disinfection project addresses the problem of autonomous navigation, both outdoors and indoors. The project refers to Simultaneous Localization And Mapping (SLAM), which was necessary for navigation purposes and visualization of the disinfection process. The project also addresses the problem of pathfinding algorithms, area coverage algorithms, and object detection algorithms.
Main results and achievements
During the project, accessories for disinfection were integrated into a robot. All necessary electrical and mechanical interfaces were designed to achieve control of the disinfection process from the autonomy module.
SLAM and navigation algorithms allow the disinfection process in the buildings – the operator can inspect the disinfection process from a safe distance. The disinfection map (based on SLAM) is built in real-time; the operator can watch it on the operator console. During autonomous disinfection, robots can cover sufficient areas with disinfectants. If the autonomous module can’t get to some locations, the operator can control disinfection manually. When the autonomous module detects human presence near the robot, the disinfection process will be stopped for safety reasons. Pathfinding algorithms work in real-time; allowing adjustment of the robot’s path when a dynamic obstacle is encountered.
Conclusion
During the project, we designed an autonomous system for disinfection, but with minor adaptations, it can be used for other applications. Also, the flexibility of the autonomy module allows the its integration with other PIAP robots without the need for hardware redesign.
Acknowledgments
The National Centre finances the project for Research and Development, 2/SZAFIR/2020 program.
{kind=link}
{kind=link}
{kind=link}
{kind=link}